










Nema 23 Stepper motor, 1A, 1.8 degree, 2 phase 6 wires
from
$63.31
Ex Tax: $63.31
- Stock: In Stock
- Model: SCJ009412
- SKU: SCJ009412
Products Sold: 0
Product Views: 1971
Ask a Question About This Product
- Description
Nema 23 Stepper motor, 1A, 1.8 degree, 2 phase 6 wires
Brief
Favorable price Nema 23 stepper motor, 0.9Nm holding torque, 1.8 deg. step angle.
Description
Nema 23 Stepper motor, 1A, 2 phase 6 leads, 1.8 degree.
Specification
| Electrical Specification | Model | SOCOJE57STH56-1006 |
| Matched Driver Model | SCJ009412(Click it to see more info) | |
| Step Angle | 1.8° | |
| Holding Torque | 0.9Nm | |
| Rated Current/phase | 1A | |
| Phase Resistance | 7.4Ω | |
| Inductance | 10mH | |
| Rotor Inertia | 280g-cm2 | |
| Physical Specification | Frame Size | 57 x 57mm |
| Length | 56mm | |
| Shaft Diameter | Φ6.35mm | |
| Shaft Length | 19mm | |
| Motor Leads | 6 | |
| Weight | 0.68kg | |
| Technical Parameters | Step Angle Accuracy | ±5% (full step, no load) |
| Resistance Accuracy | ±10% | |
| Inductance Accuracy | ±20% | |
| Temperature Rise | 80℃ Max. (rated current, 2 phase on) | |
| Ambient Temperature | -20℃~+50℃ | |
| Insulation Resistance | 100MΩ Min. 500VDC | |
| Dielectric Strength | 500V AC for one minute | |
| Shaft Radial Play | 0.02Max. 450g | |
| Shaft Axial Play | 0.08Max. 450g | |
| Quality Assurance | Warranty Period | 12 months |
| Certificate | CE, ROHs, ISO/SGS9001 |
Dimensions: (Unit=mm)
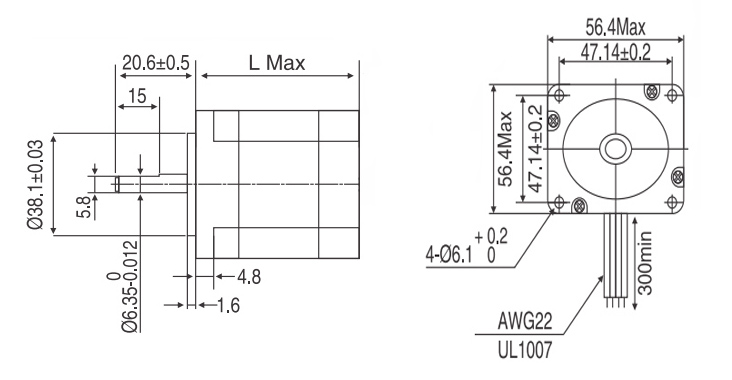 L Max=56mm
L Max=56mm
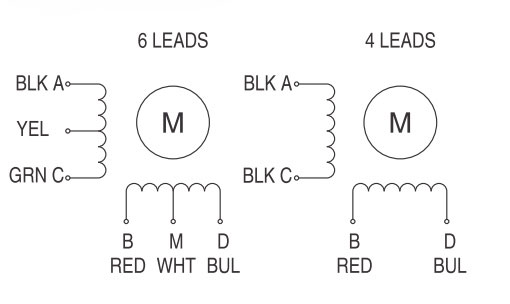
Wiring Diagram
Tips: Reasons for out of step of stepper motor
- The working torque of the stepper motor is not enough and there is not enough ability to drive load.
- The acceleration and deceleration process for starting and stopping of stepper motor is not sufficient. The stepper motor runs out of steps during acceleration and deceleration process.
- Power of the stepper motor is not enough, thus the input power of stepper motor is not enough, leading to out of step of the motor.
- Drive voltage of the stepper motor is not enough or the drive current is too low.
- Driver or controller receives the signal interference.
- Load capacity of motor is reduced due to the system resonance of the stepper motor, thus the step out of the motor is caused.
- Stepper motor driver is not matched with the signal of controller.
- The gap or the back-and-forth clearance error of synchronizing gear or reducer is not compensated through programming or the compensation value is not correct.
- There is something wrong with the control programming.



